Industrial Robotics
Real-time supervision of autonomous robot fleets
MoWo SAS / Balyo
Context
Balyo and MoWo SAS design autonomous robots for logistics warehouses. As their fleet grew, they needed a centralized tool to monitor, control, and analyze robot behavior in real time.
Challenge
The existing tools were desktop-only, monolithic, and couldn’t scale beyond a single site. Operators needed real-time visibility across multiple warehouses, with live video feeds and instant alerts.
Approach
As part of an agile team, I contributed to the design and development of a cloud-based supervision platform:
- Embedded WebRTC server on the robots for live video streaming
- Web-based supervision platform with remote control via gamepad
- Metrics collection tool (embedded)
- Network configuration optimization and debugging
- High availability setup on the infrastructure
- Automated machine deployment via Ansible with versioned configuration
- Micro-services architecture on AWS, real-time data via MQTT
- Statistics dashboard powered by Python and pandas
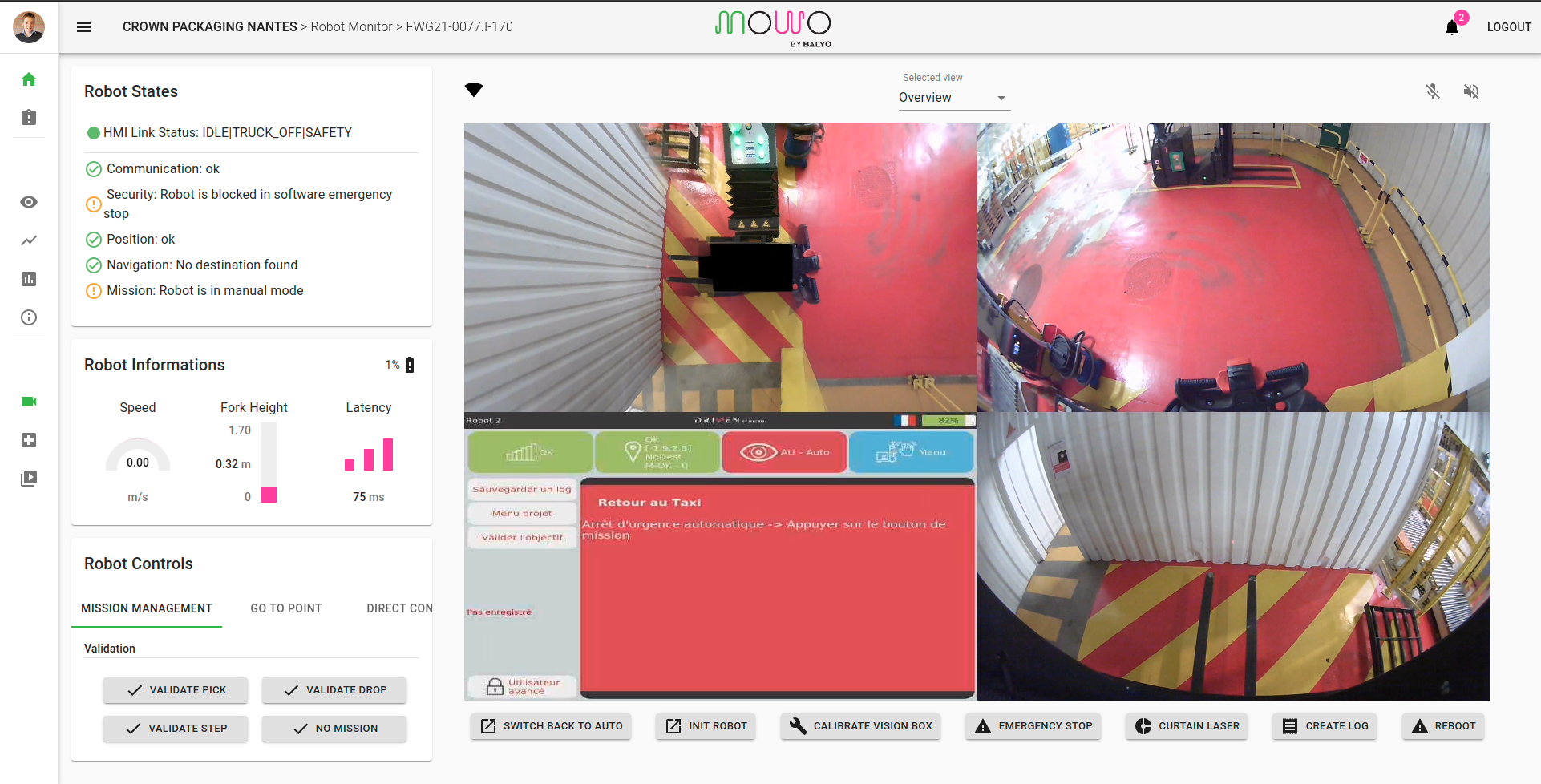
Result
The platform now monitors hundreds of robots across multiple sites. Operators can see live positions, battery levels, and task queues from any browser. Incident response time dropped significantly thanks to real-time alerts.
Technologies used
React TypeScript Redux WebRTC Python Django Docker Kubernetes AWS MQTT MongoDB Ansible