Supervision temps réel de flottes de robots autonomes
Contexte
Balyo et MoWo SAS conçoivent des robots autonomes pour la logistique. Avec la croissance de leur flotte, un outil centralisé de supervision devenait indispensable.
Problématique
Les outils existants étaient des applications desktop monolithiques, incapables de gérer plusieurs sites. Les opérateurs avaient besoin de visibilité temps réel sur plusieurs entrepôts, avec flux vidéo et alertes instantanées.
Approche
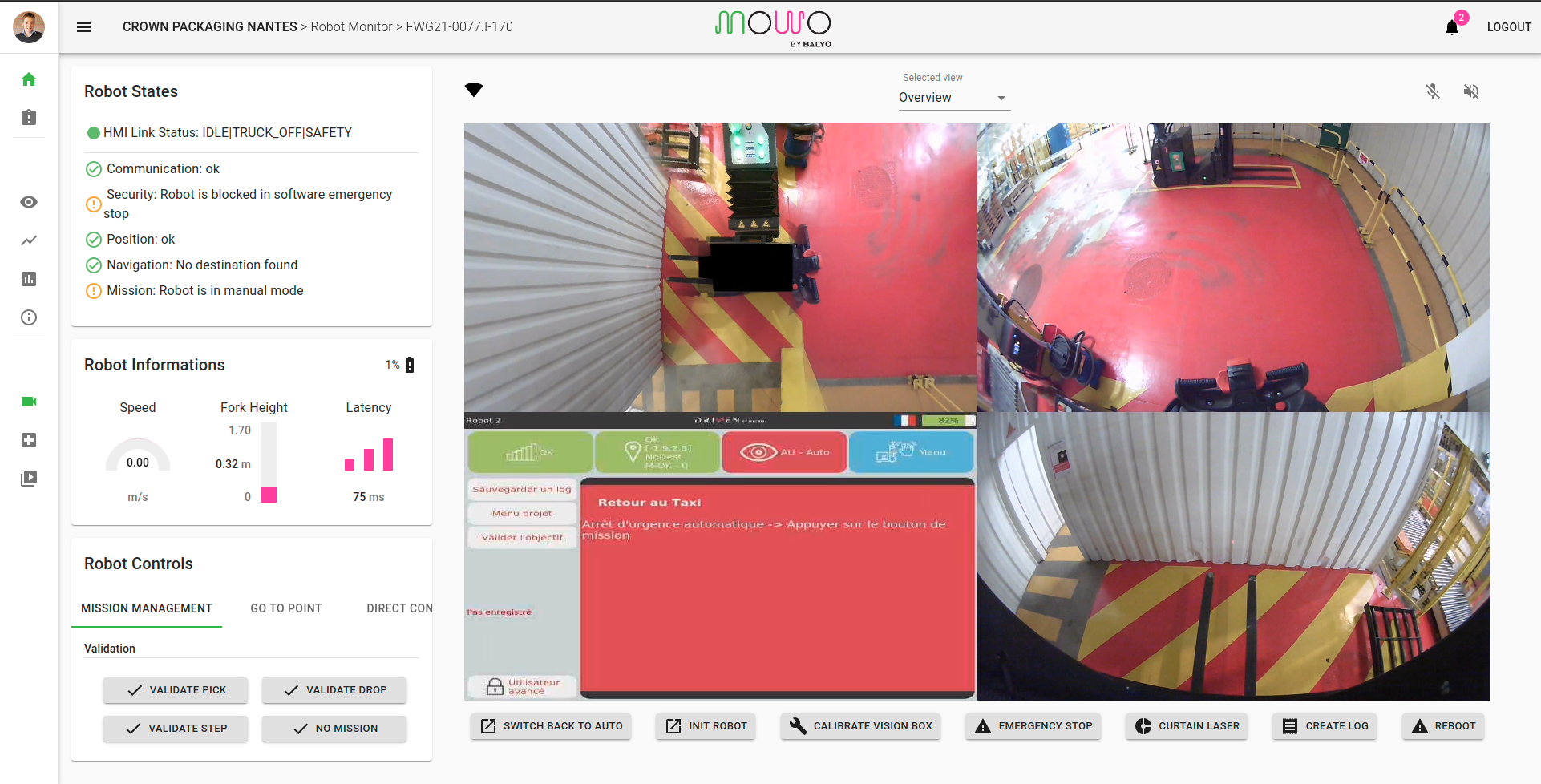
Au sein d’une équipe agile, j’ai contribué à la conception et au développement d’une plateforme de supervision cloud :
- Serveur WebRTC embarqué sur les robots pour le streaming vidéo en direct
- Plateforme de supervision web avec contrôle à distance via gamepad
- Outil de remontée de métriques (embarqué)
- Optimisation et débogage de la configuration réseau
- Mise en place de la haute disponibilité sur l’infrastructure
- Déploiement automatisé de machines via Ansible avec configuration versionnée
- Architecture micro-services sur AWS, données temps réel via MQTT
- Dashboard de statistiques basé sur Python et pandas
Résultat
La plateforme supervise aujourd’hui des centaines de robots sur plusieurs sites. Les opérateurs voient en temps réel les positions, niveaux de batterie et files d’attente de tâches. Le temps de réponse aux incidents a considérablement diminué.